
{kind=link}
I felt the Piantor needed a foot pedal, a glidepoint, some rgbs, and a little baby macro pad. So here we are.

I created an 8% tent solution and supporting wrist rests.

Then added a glide point to eliminate the need for mouse.

For meeting mode, I added this little macropad to handle all the volume and video sharing controls.

Then thought it’d be interesting to see how a foot pedal could be incorporated into the daily driver and possibly minimize keystrokes.

So far, a fun build, the glide point is a little tricking to get into scroll mode and for mouse clicks. Still reviewing those settings. The jury is still out on the foot pedel, I’ve never used one before so it feels a bit unorthodox. Thought I’d share.
Thanks for sharing it, otherwise I’d still be trying to build one just like it!
I actually started another project and then hit a dead end.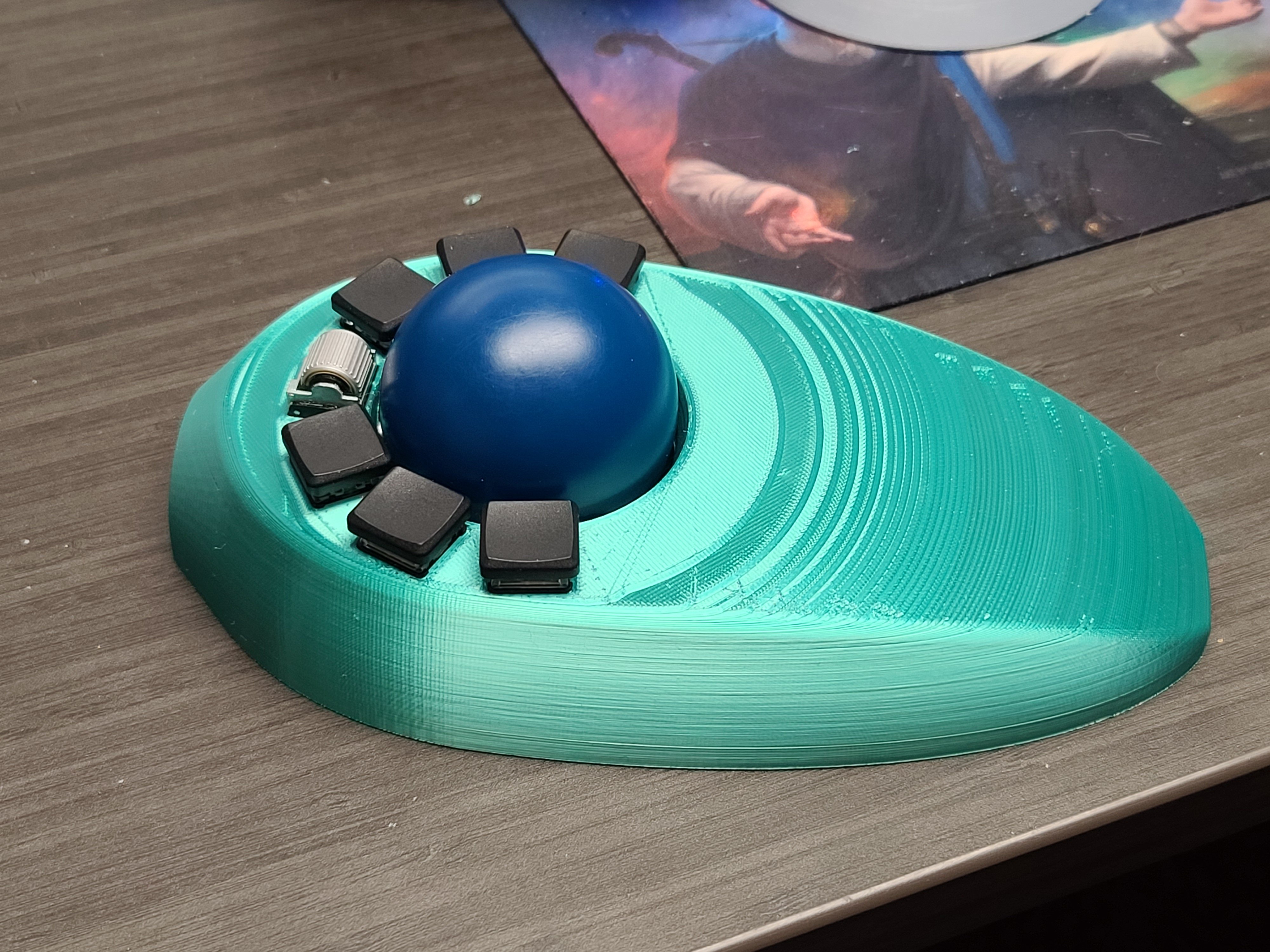 is what I was working on. 7 button (counting the encoder click), pool ball, 3 btu bearings. Was built on an eliteC and a sensor rather than a ploopy PCB to try and reduce overall height and footprint. I just couldn’t sort out programming it so it got shelved.
is what I was working on. 7 button (counting the encoder click), pool ball, 3 btu bearings. Was built on an eliteC and a sensor rather than a ploopy PCB to try and reduce overall height and footprint. I just couldn’t sort out programming it so it got shelved.
I was looking at doing something very similar, albeit with mouse micro switches. For the internals I was debating on
BastardKB
or
jfedor2
I eventually landed on Ploopy and qmk’d a kb layer for my mouse button needs.